Eigenes Cape
Selbstentwickeltes Cape fuer BeagleBoneBlack¶
Cape für die Kommunikation via ISO-SPI und Can-Bus
Der Can-Bus ist galvanisch getrennt. Dazu muss das BBB aber mit einer externen Stromversorgung mit 5V versorgt werden.
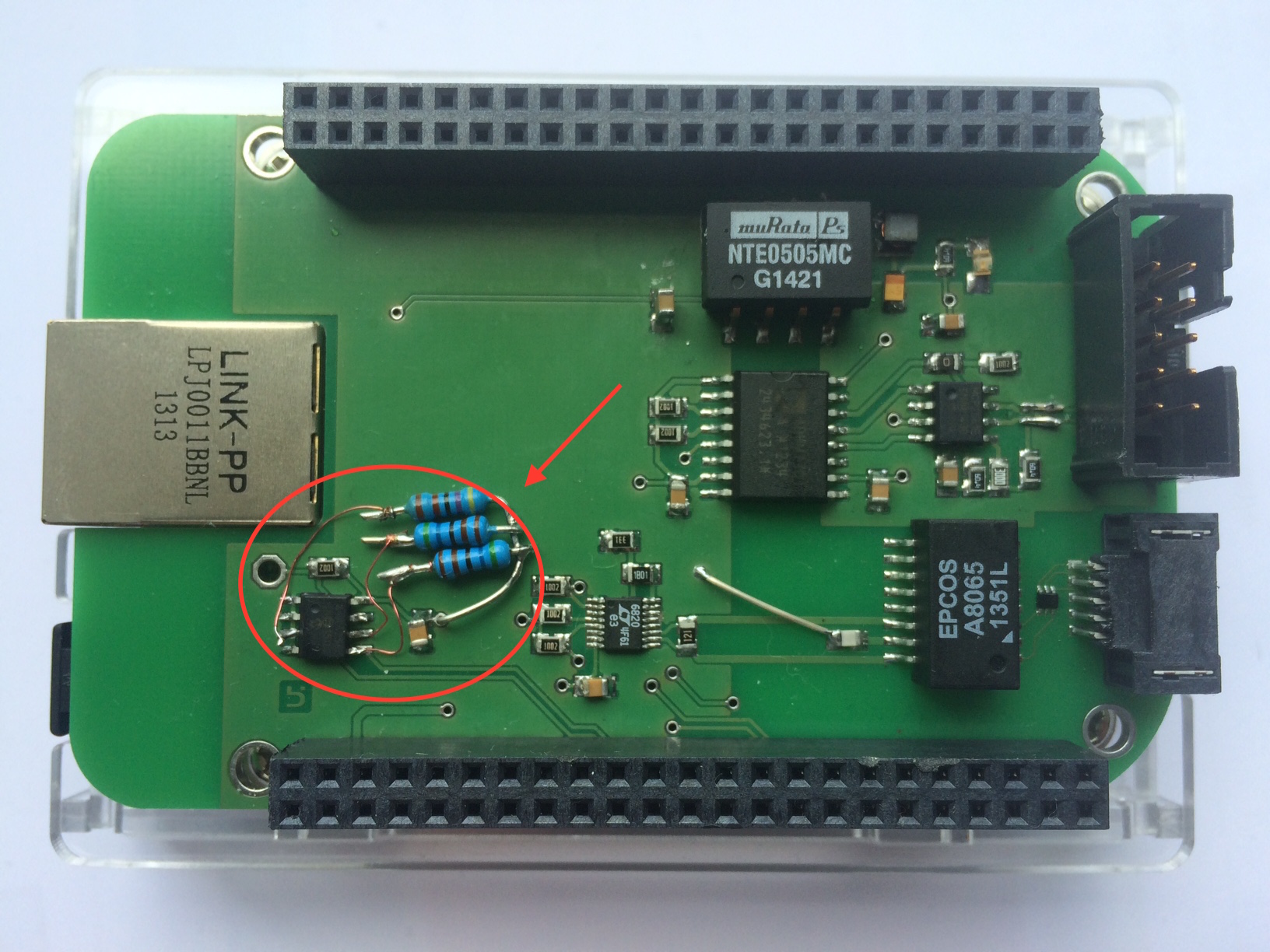
Leider haben sich beim ersten Entwurf gleich ein paar Fehler eingeschlichen. So habe ich die Pullup-Widerstaende fuer den I2C Bus zur Kommunikation mit dem eeprom vergessen. Siehe folgendes Bild:
Kommentare
Comments powered by Disqus